Project Name: Metrology-Assisted Robotic Mirror Alignment for Parabolic Trough Collectors
Funding Opportunity: Small Business Innovation Research and Small Business Technology Transfer (SBIR/STTR FY2019 Phase II)
SETO Research Area: Manufacturing and Competitiveness
Location: Pasadena, CA
SETO Award Amount $1,150,000
Awardee Cost Share: N/A
Principal Investigator: Philip Gleckman
Planned Timeline: 2018-2020
-- This project has concluded. --
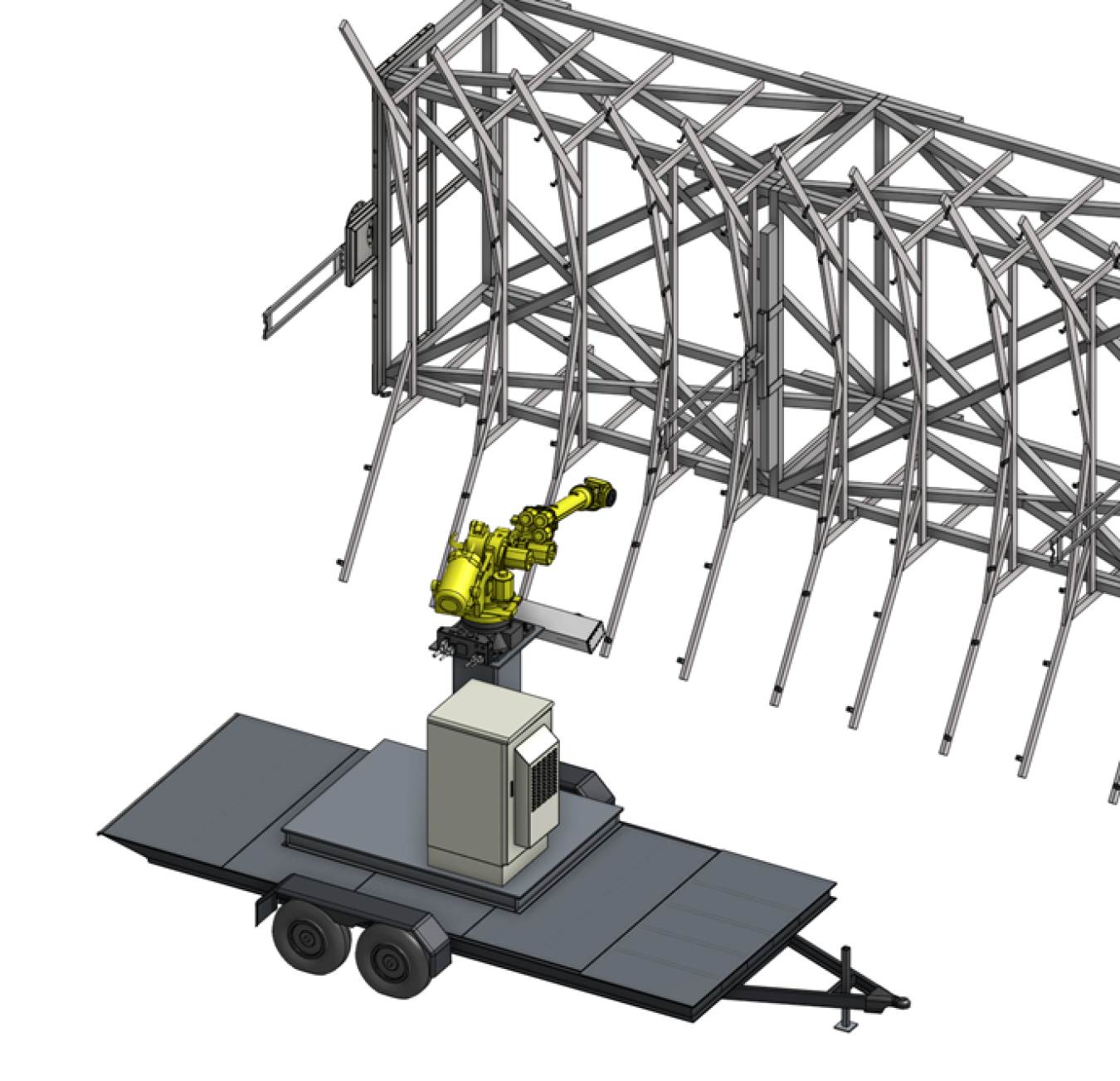
This project is creating and testing a robotic mirror-mount alignment system that can significantly reduce the cost of assembling parabolic trough solar collectors. The assembly of these collectors greatly determines their performance. To focus the sun’s rays onto a narrow receiver tube requires the seamless placement of dozens of mirrors with submillimeter accuracy. Mirror placement takes skilled labor using massive, non-mobile fixtures that result in high costs. However, parabolic troughs may be controlled remotely. The goal of this project is to develop an automated process that can lower the cost of assembling the mirror panels.
APPROACH
A robot cannot precisely assemble large objects without human guidance because it gets disoriented when it changes position. This project team will guide a robot—which was developed in a controlled environment for aerospace applications—outside, where varying sunlight, temperature, and terrain make installation more challenging than in the lab. First, the team will test the accuracy of the system’s mirror placement indoors using a small-scale substitute for the spaceframe. Then, the team will demonstrate that the same accuracy is met at full-scale outdoors.
INNOVATION
This project will use a metrology-guided robot with a feedback loop based on an interferometric system, which is a measurement method using the interference of light, radio or sound waves. This helps drive down the total cost of labor and assembly by significantly reducing the amount of time it takes to install a solar collector field for power or heat generation. For heat generation, the lower solar field cost will enable a path to a levelized cost of heat (LCOH) of $.015 per kilowatt-hour thermal (kWhth). That LCOH will allow solar steam to compete with natural gas that large manufacturers use, even at historically low natural gas prices.